Multibody Joints and IK
Godot Rapier has Impulse Joints, which use Constraints-based approach.
It also has Multibody Joints, which use the Reduced Coordinates Approach. They are more stable but slower and can be used for IK. Multibody joints are a chain of multiple joints that are continuously connected, and use the Rapier Extension Classes.
The choice of approach depends on the application. For robotics, the reduced-coordinates approach is generally preferred because of its accuracy and ease of use, e.g., for control, inverse kinematics, etc.
Inverse Kinematics
The multibody joints support IK target nodes. In order to use it, create a Rapier Extension Class of the node you want to use (eg. RapierPinJoint2D) and select joint_type to Multibody:
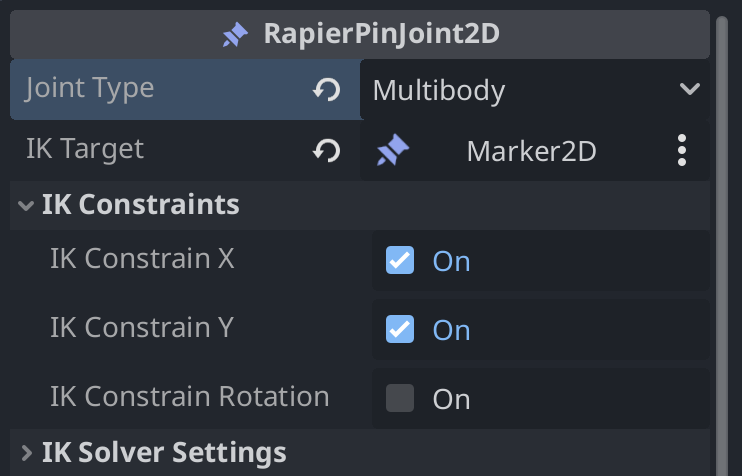
Now, the whole chain structure will follow the ik_target:

When setting a multibody joint, the rigidbodies need to not collide with eachother and be massless.